همه چیز راجع به موتورهای آهنربای دائم
موتور آهنربای دائمی (PM) نوعی موتور ac است که از آهنرباهای تعبیه شده در آن یا متصل به سطح روتور موتور استفاده میکند. در این مقاله، تعریف بنیادین این اصطلاح، مفاهیم، نظریه و فیزیک موتورهای PM را مطرح میکنیم.
سرعت موتورهای ac در اکثر موارد با استفاده از یک درایو الکتریکی کنترل میشود. در بسیاری از سناریوها، برای ایجاد یک میدان مغناطیسی گردان از درایوهای الکتریکی با موتورهای القایی و سیمپیچهای استاتور استفاده میشود، با این حال به کمک حسگرهای بازخورد سرعت یا موقعیت به عنوان مرجعی برای درایو الکتریکی میتوان سرعت را به طور دقیق کنترل کرد.
در برخی شرایط، بدون نیاز به حسگرهای بازخورد، میتوان سرعت را نسبتاً دقیق کنترل کرد. این امر با استفاده از یک موتور آهنربای دائمی (PM) و فرآیندی به نام (روش تزریق سیگنال با فرکانس زیاد) امکانپذیر است.
ماشینهای القایی (IM)
ماشین القایی را معمولاً موتور ac نیز مینامند. همگام ساخت موتور مغناطیس دائم، میدان گردان با استفاده از سیمپیچ استاتور ایجاد میشود. همچنین میدان گردان در میلههای روتور جریان را القا میکند. ما برای ایجاد جریان به اختلاف سرعت بین روتور و میدان مغناطیسی نیاز داریم. برهمکنش بین میدان و جریان، نیروی محرکه را تولید میکند. بنابراین، ماشینهای القایی ac موتورهای غالب هستند که توسط موتور مغناطیسی کار میکنند.
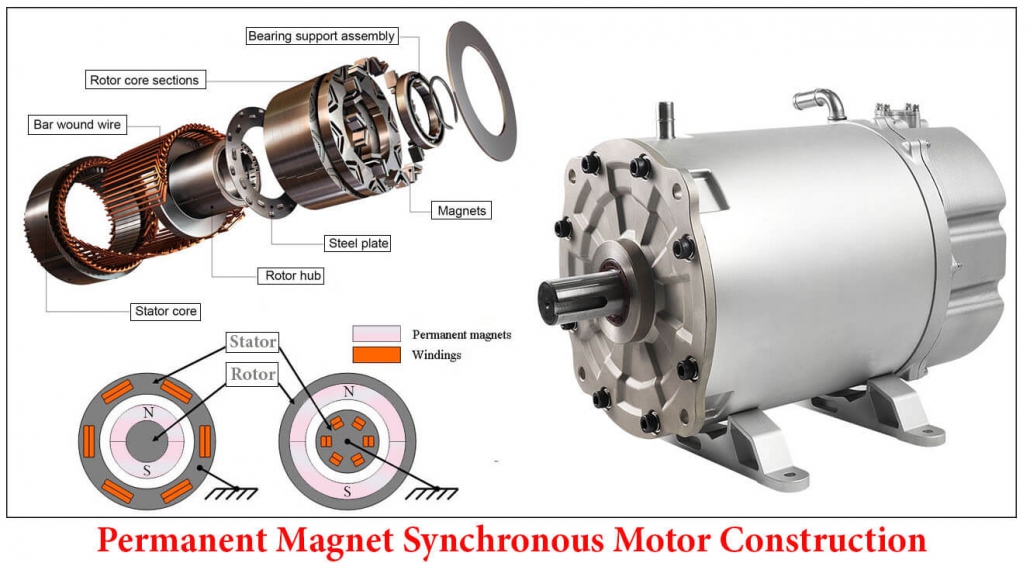
موتورهای PM
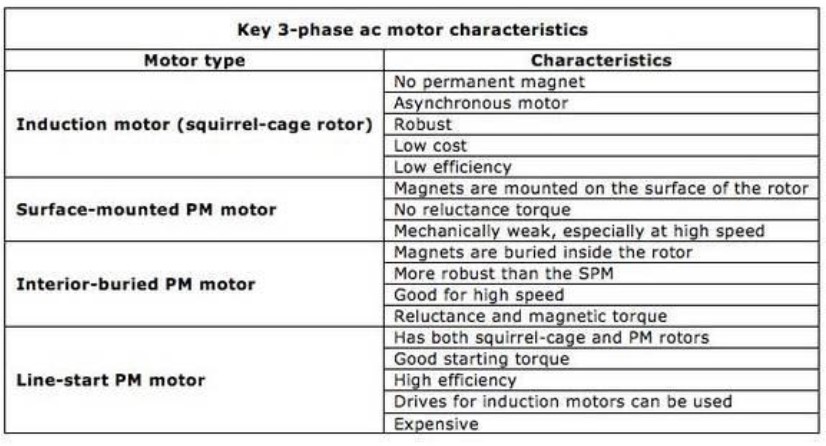
موتور PM یک موتور ac است که از آهنرباهای تعبیهشده در آن یا متصل به سطح روتور موتور استفاده میکند. با استفاده از آهنرباها میتوانیم شار ثابت برای موتور تولید کنیم، که در این صورت مثل موتور القایی برای تولید شار ثابت موتور به میدان استاتور نیاز نداریم تا به روتور متصل شویم. موتور چهارم معروف به موتور PM خودراهانداز (LSPM) است که از ویژگیهای هر دو موتور استفاده میکند. موتور LSPM از آهنرباهای موتور PM داخل روتور و میلههای روتور موتور قفس سنجابی استفاده میکند و گشتاور و کارایی را به حداکثر میرساند (جدول 1).
مشخصههای اصلی موتور ac 3 فاز
شار، پیوند شار، شار مغناطیسی
برای درک عملیات موتورهای PM، لازم است که اول مفاهیم شار، پیوند شار، و شار مغناطیسی را بیان کنیم.
شار: گردش جریان از طریق یک هادی میدان مغناطیسی ایجاد میکند. شار میزان جریان یک وسیله را در واحد سطح تعریف میکند. جریان شار میزان گردش جریان در یک هادی در سطح مقطع است.
پیوند شار: پیوند شار زمانی رخ میدهد که یک میدان مغناطیسی با یک ماده برهمکنش داشته باشد، مانند آنچه هنگام عبور میدان معناطیسی از سیمپیچ رخ میدهد. پیوند شار با تعداد سیمپیچها و شار مشخص میشود، که در آن برای نشاندادن مقدار لحظهای شار متغیر با زمان از استفاده میشود. پیوند شار را با معادله زیر تعریف میکنیم:
فرمول پیوند شار:
شار مغناطیسی: شار مغناطیسی به صورت میزان جریان میدان مغناطیسی در سطح مقطع یک هادی تعریف میشود. میدان شار مغناطیسی با یک آهنربای دائم داخل موتور آهنربای دائمی یا روی سطح آن ایجاد میشود.
القاگر: القاگر یک قطعه مداری شامل سیم هادی است که معمولاً به شکل سیمپیچ است. هادی حامل جریان ثابت است که میدان مغناطیسی ثابت ایجاد میکند. میتوان نشان داد که میدان مغناطیسی و جریانی که آن را تولید میکنند به طور خطی مرتبط هستند. تغییر میدان مغناطیسی متناسب با میزان تغییر جریانی که میدان مغناطیسی تولید میکند در یک هادی مجاور ولتاژ القا میکند. ولتاژ در رسانا با معادله زیر به دست میآید:
فرمول ولتاژ القاگر:
ضریب القایی: ضریب القایی (L) ثابت تناسب است که رابطه بین ولتاژهای ناشی از میزان تغییر زمانی جریان که یک میدان مغناطیسی را تولید میکند تعریف میکند. به عبارت سادهتر، ضریب القایی در واقع پیوند شار در واحد جریان است. باید نشان دهیم که ضریب القایی یک جزء پسیو است و صرفاً یک ویژگی هندسی محسوب میشود. ضریب القایی برحسب هنری (H) یا وبر-دور بر آمپر اندازهگیری میشود.
محور d و محور q: از نظر هندسی، محورهای «d» و «q» بازنماییهای تک فازی شار همراه با سه کمّیت سینوسی جداگانه در سرعت زاویهای یکسان هستند. محور d، که محور مستقیم هم گفته میشود، محوری است که به کمک آن شار توسط سیمپیچ میدان تولید میشوند. محور q، یا محور ربع، محوری است که گشتاور بر روی آن تولید میشود. به عبارت سادهتر، محور d راستای اصلی شار است، درحالیکه محور q راستای اصلی تولید گشتاور است.
نفوذپذیری مغناطیسی: در الکترومغناطیس، نفوذپذیری در واقع اندازهگیری قابلیت ماده برای پشتیبانی از تشکیل یک میدان مغناطیسی درون خودش است. ازاینرو، میتوان آن را درجه مغناطیسشدگی یک ماده در پاسخ به یک میدان مغناطیسی اعمالشده دانست.
مدار معادل موتور PM: موتور آهنربای دائمی را میتوان در چند مدل مختلف موتور نشان داد. یکی از رایجترین روشها مدل موتور d-q است.
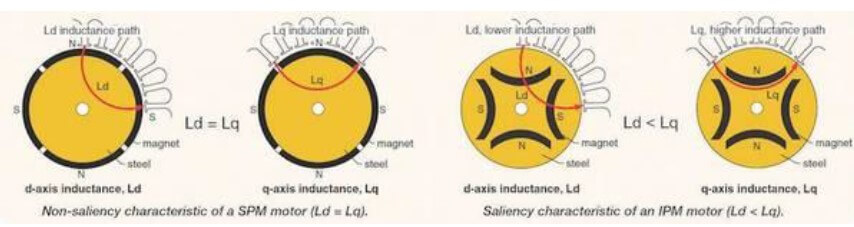
ضریب القایی محور d و محور q موتور PM: ضریب القاییهای محور d و q در واقع ضریب القاییهایی هستند که با عبور مسیر شار از روتور نسبت به قطب مغناطیسی اندازهگیری میشوند. ضریب القایی محور d همان ضریب القایی است که وقتی شار از قطبهای مغناطیسی عبور میکند انداهگیری میشود. ضریب القایی محور q همان ضریب القایی است که وقتی شار بین قطبهای مغناطیسی عبور میکند اندازهگیری میشود.
در یک دستگاه القایی، پیوند شار روتور بین محور d و q یکسان خواهد بود. بااینحال، در یک دستگاه آهنربای دائم، آهنربا آهن موجود را برای پیوند شار کاهش میدهد. نفوذپذیری آهنربا نزدیک به نفوذپذیری هوا است. بنابراین، آهنربا را میتوان به صورت شکاف هوا در نظر گرفت. آهنربا با پیمایش محور d در مسیر شار قرار میگیرد. مسیر شار که از محور q عبور میکند با آهنربا برخورد نمیکند. بنابراین آهن بیشتری را میتوان به مسیر شار محور q متصل کرد، که موجب القایی بیشتر میشود. موتوری با آهنربای تعبیهشده دارای ضریب القایی محور q بزرگتری نسبت به ضریب القایی محور d است. موتوری با آهنرباهای تعبیهشده روی سطح تقریباً دارای ضرایب القایی یکسان در محور d و q است، زیرا آهنرباها بیرون روتور قرار دارند و مقدار آهن متصلشده توسط میدان استاتور را محدود نمیکنند.
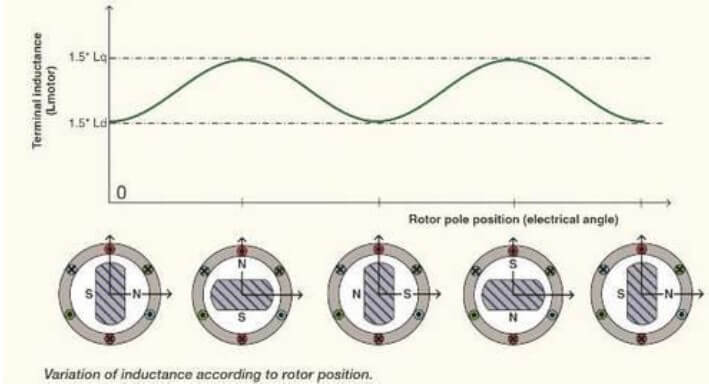
برجستگی مغناطیسی: برجستگی حالت یا کیفیتی است که به واسطه آن چیزی نسبت به همسایگانش متمایز میشود. برجستگی مغناطیسی رابطه بین ضریب القایی (محور d) شار اصلی روتور و ضریب القایی (محور q) تولیدشده توسط گشتاور اصلی را توصیف میکند. برجستگی مغناطیسی بنا بر موقعیت روتور به میدان استاتور، که حداکثر برجستگی در 90 درجه الکتریکی از محور شار اصلی (محور d) رخ میدهد، تغییر میکند (شکل 1).
جریان تحریک: جریان تحریک جریانی در سیمپیچهای استاتور است که برای ایجاد شار مغناطیسی در هسته روتور لازم است. دستگاههای آهنربای دائمی در سیمپیچ استاتور به جریان تحریک نیاز ندارند زیرا یک آهنربای موتور PM یک میدان مغناطیسی ایستاده تولید میکند.
جریان ثانویه: جریان ثانویه، که «جریان تولید گشتاور» نیز نامیده میشود، جریان موردنیاز برای ایجاد گشتاور موتور الکتریکی است. در دستگاه آهنربای دائمی، جریانهای تولید گشتاور بیشترین بخش کشش جریان را تشکیل میدهند.
جریان توقف (Pull in): درایو الکتریکی عادی برخلاف مجموعه سازگار تقویتکننده و سروُ برای کنترل حرکت، اطلاعاتی درباره موقعیت قطب مغناطیسی روتور موتور ندارد. بدون اطلاع از موقعیت قطب مغناطیسی، نمیتوان میدانی در استاتور ایجاد کرد که تولید گشتاور را به حداکثر برساند. بنابراین، درایو الکتریکی میتواند ولتاژ dc را برای قفلکردن میدان مغناطیسی در یک موقعیت شناختهشده تأمین کند. کشش جریان موردنیاز برای توقف موتور را «جریان توقف» مینامیم.
تزریق فرکانس بالا: تزریق فرکانس بالا یک روش اینورتر است که برای تشخیص موقعیت قطب مغناطیسی موتور PM استفاده میشود. در این روش در ابتدا، یک سیگنال فرکانس بالا، ولتاژ پایین توسط اینورتر به موتور در محور دلخواه تزریق میشود. سپس، اینور زاویه تحریک را تغییر میدهد و جریان را نظارت میکند.
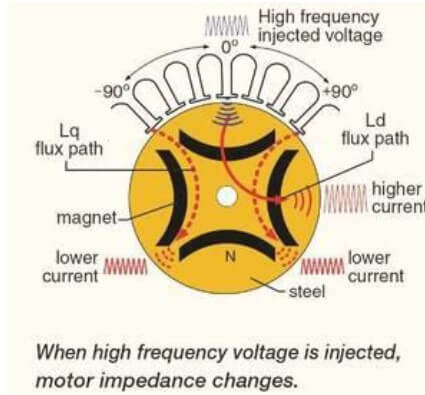
امپدانس روتور بر اساس زاویه تزریق تغییر میکند. هرگاه محور تزریق سیگنال فرکانس بالا و محور قطب مغناطیسی (محور d) همتراز شدند، یعنی در صفر درجه قرار گرفتند، آنگاه امپدانس پایانه موتور آهنربای دائمی داخلی (IPM) کاهش مییابد. حداکثر درجه امپدانس است.
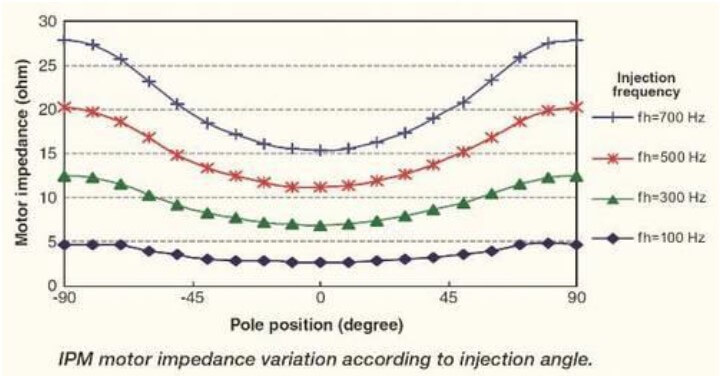
با استفاده از این ویژگی، درایو ایرانی میتواند موقعیت روتور را بدون انکودرهای پالسی با تزریق جریان/ ولتاژ ac فرکانس بالا به موتور IPM شناسایی کند. بعلاوه، روش تزریق سیگنال فرکانس بالا را میتوان برای تشخیص سرعت در ناحیهای با سرعت کم به کار برد، که در آن معمولاً کنترل گشتاور تمام بار بسیار دشوار است، زیرا سطح ولتاژ ضد محرکه (back emf) بسیار پایین است.
شکل موجی Back-emf
Back-emf مخفف نیروی معکوس برق ران است، که آن را نیروی ضدمحرکه برق ران مینامند. نیروی ضدمحرکه برقران زمانی در موتورهای الکتریکی رخ میدهد که بین سیمپیچ استاتور و میدان مغناطیسی روتور حرکت نسبی وجود داشته باشد. ویژگیهای هندسی روتور تصویر شکل موجی نیروی ضد محرکه برق ران را مشخص میکند. این اشکال موجی میتوانند سینوسی، ذوزنقه، مثلثی، یا چیزی بین اینها باشد.
دستگاههای القایی و PM اشکال موجی نیروی ضدمحرکه برق ران تولید میکنند. در یک دستگاه القایی، به علت نبود میدان استاتور، با تضعیف میدان سینوسی، روتور بهآرامی شکل موجی نیروی ضد محرکه برقران نیز تضعیف میشود. باوجوداین، با دستگاه PM، روتور میدان مغناطیسی خود را ایجاد میکند. بنابراین، هرگاه روتور در حرکت باشد ولتاژ را میتوان در سیمپیچهای استاتور القا کرد. ولتاژ نیروی ضدمحرکه برقران به صورت خطی با سرعت افزایش مییابد، و در تعیین حداکثر سرعت کار عامل تعیینکننده است.
گشتاور ماشین PM
گشتاور دستگاه الکتریکی را میتوان به دو مؤلفه تقسیم کرد: گشتاور مغناطیسی و گشتاور رلوکتانسی. گشتاور رلوکتانسی نیرویی است که بر روی ماده مغناطیسی عمل میکند و معمولاً با شار اصلی همتراز میشود تا رلوکتانس را به حداقل برساند.» به عبارت دیگر، گشتاور رلوکتانس گشتاوری است که توسط همترازی محور روتور با میدان شار استاتور تولید میشود. گشتاور مغناطیسی گشتاوری است که از برهمکنش بین میدان شار مغناطیسی و جریان در سیمپیچ استاتور ایجاد میشود.
گشتاور رلوکتانس: گشتاور رلوکتانس گشتاوری است که از طریق همترازی روتور تولید میشود و این امر زمانی رخ میدهد که میدان مغناطیسی یک جریان مستقیم و مطلوب را از قطب شمالی استاتور به قطب جنوبی استاتور هدایت کند.
گشتاور مغناطیسی: آهنربای دائم یک میدان شار در روتور ایجاد میکند. استاتور میدانی را ایجاد میکند که با میدان مغناطیسی روتور برهمکنش داشته باشد. تغییر موقعیت میدان استاتور برحسب میدان روتور موجب تغییر روتور میشود. تغییر ناشی از این برهمکنش را گشتاور مغناطیسی مینامیم.
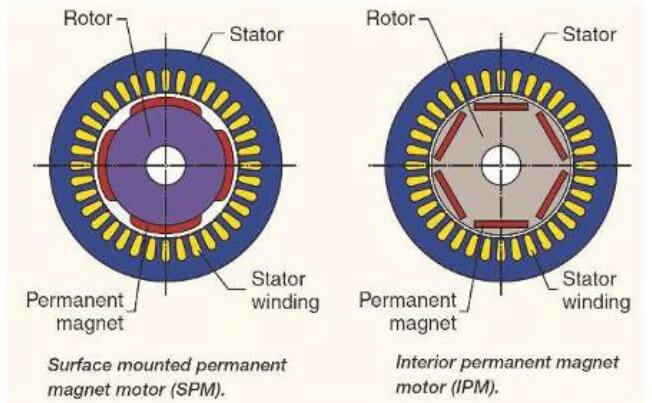
SPM در برابر IPM
موتور PM را میتوان به دو گروه مهم تقسیم کرد: موتورهای آهنربای دائمی سطح (SPM) و موتورهای آهنربای دائمی داخلی (IPM) (شکل 3). هیچ یک از طرحهای موتور شامل میلههای روتور نیستند. هر دو نوع با آهنرباهای دائمی چسبانده شده به روتور یا داخل روتور شار مغناطیسی تولید میکنند.
موتورهای SPM دارای آهنرباهایی هستند که به قسمت بیرونی سطح روتور چسبیدند. به دلیل نصب مکانیکی این آهنرباها، قدرت مکانیکی آنها ضعیفتر از موتورهای IPM است. قدرت مکانیکی ضعیف حداکثر سرعت مکانیکی ایمن موتور را محدود میکند. بعلاوه، این موتورها برجستگی مغناطیسی بسیار محدودی دارند ( ). مقادیر القایی اندازهگیریشده در پایانههای روتور صرفنظر از موقعیت روتور، ثابت هستند. به دلیل نسبت برجستگی نزدیک به یک، طرحهای موتور SPM، برای تولید گشتاور اگرچه نه به طور کامل، به مؤلفه گشتاور مغناطیسی بستگی دارند.
موتورهای IPM دارای آهنرباهای دائمی داخل روتور هستند. موقعیت آهنرباهای دائمی برخلاف آهنرباهای SPM باعث میشود که موتورهای IPM بیشتر مکانیکی به نظر برسند، و برای عملیات در سرعتهای بسیار بالا مناسب باشند. این موتورها با میزان برجستگی مغناطیسی نسبتاً بالایشان تعریف میشوند (Lq>Ld). موتور IPM به خاطر برجستگی مغناطیسیشان با بهرهگیری از گشتاور مغناطیسی و گشتاور رلوکتانسی موتور میتوانند گشتاور ایجاد کنند (شکل 4).
ساختارهای موتور PM
ساختارهای موتور PM را میتوان به دو گروه تقسیم کرد: داخلی و سطحی. هر گروه زیرمجموعههای خودش را دارد. در موتور PM سطحی، آهنرباها میتوانند روی سطح روتور قرار داشته باشند یا به سطح روتور اضافه شوند، بدینترتیب استحکام طرح افزایش مییابد. موقعیت قرارگیری و طرح موتور مغناطیسی دائمی داخلی میتواند بسیار متفاوت باشد. آهنرباهای موتور IPM وقتی نزدیک به هسته باشند میتوانند به صورت یک بلوک بزرگ یا زیگزاگی اضافه شوند. روش دیگر این است که آهنرباها را به صورت یک الگوی پرّه چرخ جاسازی شوند.
تغییر ضریب القایی موتور PM با بار
برای تولید گشتاور میتوان تعداد محدودی شار را به یک قطعه آهن وصل کرد. در نهایت، اهن اشباع میشود و دیگر نمیتوان شاری به آن وصل کرد. در نتیجه، ضریب القایی مسیری که میدان شار پیموده کاهش مییابد. در دستگاه PM، مقادیر ضریب القایی محور d و q با افزایش جریان بار کاهش مییابد.
ضرایب القایی محورهای d و q موتور SPM تقریباً یکسان است. از آن جاییکه آهنربا خارج از روتور قرار دارد، بنابراین ضریب القایی محور q با نسبت یکسان ضریب القایی محور d کاهش مییابد. باوجوداین، ضریب القایی موتور IPM به طور متفاوت کاهش مییابد. دوباره، ضریب القایی محور d به طور طبیعی کمتر است، زیرا آهنربا در مسیر شار قرار دارد و ویژگی القایی تولید نمیکند. بنابراین، آهن کمی برای اشباع در محور d قرار دارد، که موجب کاهش قابلتوجه شار بر حسب محور q میشود.
تضعیف/ تشدید شار موتورهای PM
شار در موتور آهنربای دائمی توسط آهنرباها تولید میشود. میدان شار مسیر خاصی را دنبال میکند، که میتواند تقویت یا تضعیف شود. موتور با تقویت یا تشدید میدان شار میتواند به طور موقت تولید گشتاور را افزایش دهد. تضعیف میدان شار موجب خنثیشدن میدان مغناطیسی موجود موتور میشود. میدان مغناطیسی کاهشیافته تولید گشتاور را محدود میکند، اما ولتاژ back-emf را کاهش میدهد. ولتاژ کاهشیافته back-emf با آزادسازی ولتاژ، موتور را وادار میکند تا در سرعتهای خروجی بالاتر کار کند. هر دو نوع عملیات به جریان موتور اضافی نیاز دارند. راستای جریان موتور در محور d، که توسط کنترلکننده موتور فراهم میشود، اثر موردنظر را تعیین میکند.
زاویه تحریک
زاویه تحریک زاویهای است که در آن مجموع بردار اشکال موجی محور d و q برحسب محور d برای موتور تحریک میشوند. محور d همیشه جایی است که آهنربا وجود داشته باشد. حداکثر شار مغناطیسی در محور q به دست میآید، که در 90 درجه الکتریکی از محور d قرار دارد. بنابراین، در بیشتر منابع زاویه تحریک 90 درجه اختلاف از محور d تا محور q لحاظ میشود.
زاویه فازی و گشتاور
گشتاور مغناطیسی زمانی به حداکثر میرسد که میدان استاتور روتور موتور را 90 درجه الکتریکی از محور d (موقعیت مغناطیسی موتور) تحریک کند. گشتاور رلوکتانسی از مسیر متفاوتی پیروی میکند و زمانی به حداکثر میرسد که 45 درجه الکتریکی از محور q عبور کند. حداکثر گشتاور مغناطیسی از گشتاورهای رلوکتانسی و مغناطیسی موتور بهرهمند میشود. تغییر مسیر از محور q موجب کاهش گشتاور مغناطیسی میشود، اما با افزایش گشتاور رلوکتانسی مقدارش به مراتب بیشتر میشود. حداکثر گشتاور ترکیبی مغناطیسی و رلوکتانسی تقریباً در 45 درجه الکتریکی از محور q رخ میدهد، اما زاویه دقیق بر اساس مشخصههای موتور PM تغییر میکند.
چگالی توان موتور IPM
تولید برق با آهنربای دائمی و موتور PM به پیکربندی آهنرباهای موتور و برجستگی موتور حاصل بستگی دارد. موتورهایی با نسبت برجستگی بالا (Lq>Ld) با استفاده از گشتاور رلوکتانسی میتوانند بازده و گشتاور موتور را افزایش دهند. برای تغییر زاویه تحریک بر حسب محور d میتوان از اینورتر صنعتی ایرانی استفاده کرد، بدینترتیب گشتاورهای رلوکتانسی و مغناطیسی موتور به حداکثر میرسد.
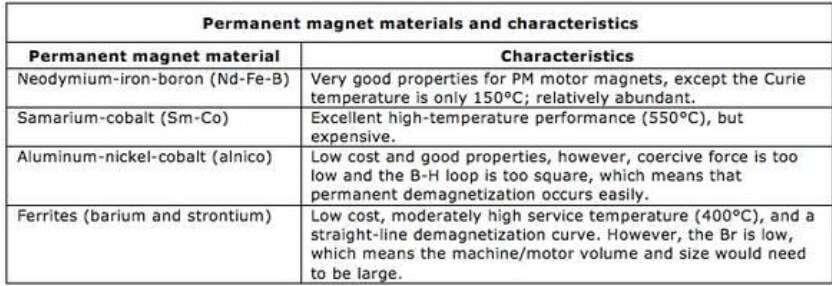
انواع آهنرباهای موتور PM
چند نوع ماده آهنربای دائمی وجود دارد که به تازگی برای موتورهای الکتریکی به کار میروند. هر نوع ماده مزایا و معایب خود را دارد.
مغناطیسزدایی آهنربای دائمی
آهنربای دائمی بهشدت دائمی هستند و قابلیتهای محدودی دارند. نیروی خاصی میتوانند بر روی این مواد اعمال شوند و حالت مغناطیسی آنها را خنثی کنند. به عبارت دیگر، میتوان ویژگیهای مغناطیسی مواد آهنربای دائمی را حذف کرد. خواص مغناطیسی ماده مغناطیسی دائمی را زمانی میتوان خنثی کرد که ماده بهشدت کرنشدار باشد، و به درجه حرارتهای قابلتوحه برسد، یا تحت تأثیر اختلال الکتریکی بزرگ قرار بگیرد.
اول اینکه، کرنشدار کردن یک آهنربای دائمی معمولاً با ابزار فیزیکی انجام میشود. خاصیت مغناطیسی یک ماده مغناطیسی را در صورتی میتوان خنثی کرد که تضعیف نشده باشد، و ضربهها/ خرابیهای شدیدی را تجربه کرده باشد. یک ماده فرومغناطیسی دارای ویژگی مغناطیسی ذاتی است. باوجوداین، ویژگیهای مغناطیسی را میتوان در هر جهتی منتشر کرد. یک روش برای مغناطیسی کردن مواد فرومغناطیسی این است که از یک میدان مغناطیسی قوی برای ماده استفاده کنیم تا دوقطبیهای مغناطیسیاش همتراز شوند. همتراز شدن دوقطبیها باعث میشود که میدان مغناطیسی ماده به مسیر خاصی هدایت شوند. با یک ضربه شدید میتوان همترازی مغناطیسی دامنههای مغناطیسی ماده را حذف کرد، که قدرت میدان مغناطیسی موردنظر را تضعیف میکند.
دوم اینکه، دما نیز میتواند بر روی آهنربای دائمی تأثیر بگذارد. دما ذرات مغناطیسی را در یک آهنربای دائمی وادار میکند تحریک شوند. دوقطبیهای مغناطیسی میتوانند دربرابر تحریک حرارتی مقاومت کنند. باوجوداین، دورههای طولانی تحریک میتواند مقاومت آهنربا را، حتی در دمای اتاق، تضعیف کند. بعلاوه، همه مواد مغناطیسی دارای آستانهای معروف به «Curie temperature» هستند، که دمایی را نشان میدهد که در آن تحریک حرارتی باعث میشود ماده به طور کامل خاصیت مغناطیسیاش را از دست بدهد. عبارتهایی مانند وادارندگی (Coercivity) و قدرت نگهدارندگی(retentivity) برای تعریف قابلیت نگهدارندگی مقاومت ماده مغناطیسی به کار میروند.
در انتها، اختلالات الکتریکی بزرگ باعث میشوند آهنربای دائمی خاصیت مغناطیسی خود را از دست بدهد. اختلالات الکتریکی از برهمکنش مادهای با میدان مغناطیسی بزرگ یا در صورتی که جریان بزرگی از ماده عبور کند شکل میگیرند. به همین ترتیب، اعمال یک میدان مغناطیسی قوی یا جریان بر روی میدانی که توسط آهنربای دائمی ایجاد شده موجب مغناطیسزدایی میشود.
خودحسگر در برابر عملیات حلقه بسته
درایوهای ac استاندارد با استفاده از پیشرفتهای اخیر در فنآوری درایو میتوانند خود را شناسایی کرده و موقعیت آهنربایی موتور را ردیابی کنند. سیستم حلقه بسته معمولاً از کانال Z-Pulse برای بهینهسازی عملکرد استفاده میکند. درایو از طریق روالهای خاصی موقعیت دقیق آهنربای موتور را از لحاظ وجود خطا با کانال z به دست میآورد. دانستن موقعیت دقیق آهنربا باعث میشود که تولید بهینه گشتاور موجب بازده بهینه شود.
موتورهای سروُ
موتورهای سروُ موتورهای آهنربای دائمی هستند که برای کاربردهای کنترل حرکت به کار میروند. معمولاً، در یک طرح موتور آهنربای دائمی داخلی/ درونی، برای به حداکثر رساندن عملکرد این موتورها با یک تقویتکننده جفت میشوند. سازنده تقویتکننده را به خوبی با موتور PM تنظیم میکند تا به کارایی بهینه دست یابد. پیکربندی تقویتکننده/ سروُ معمولاً از بازخورد موتور استفاده میکند، که موقعیت قطب مغناطیسی و بازخورد سرعت را فراهم میآورد.
مقاله مرتبط: پارامتر درایو


دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.